
Arduino Ultrasonic sensors

ABOUT THIS PROJECT
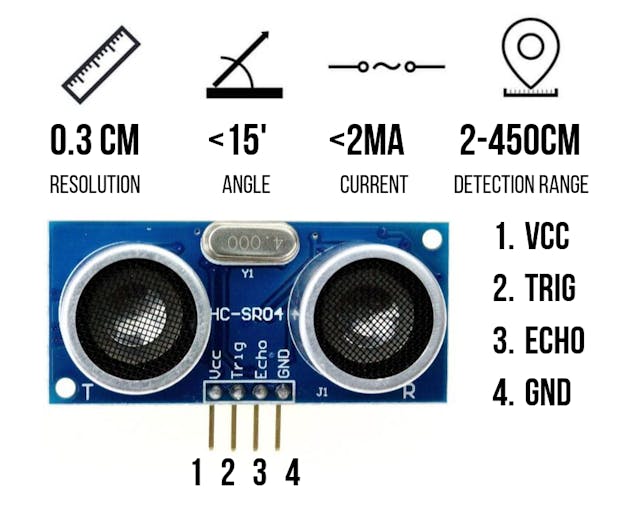
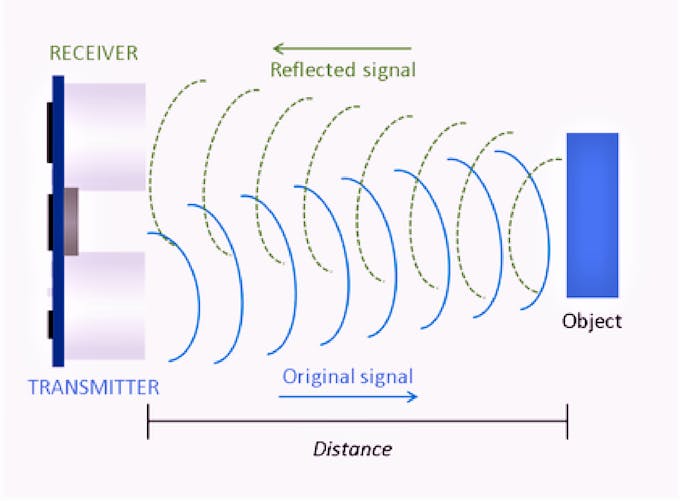
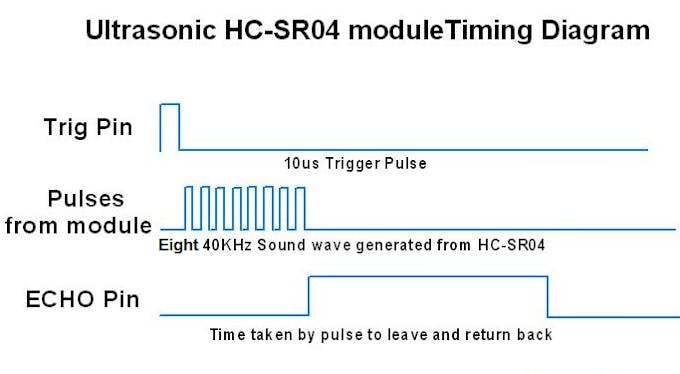
Ultrasonic Sensor HC-SR04 is a sensor that can measure distance. It emits an ultrasound at 40 000 Hz (40kHz) which travels through the air and if there is an object or obstacle on its path It will bounce back to the module. Considering the travel time and the speed of the sound you can calculate the distance.
The configuration pin of HC-SR04 is VCC (1), TRIG (2), ECHO (3), and GND (4). The supply voltage of VCC is +5V and you can attach TRIG and ECHO pin to any Digital I/O in your Arduino Board.
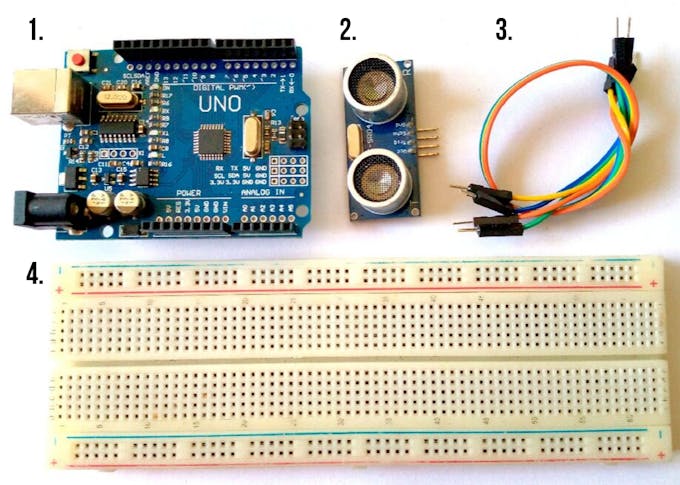
1. Arduino UNO R3 CH340 (you can use any Arduino Boards)
2. Ultrasonic Sensor HC-SR04
3. Male to Male Jumper Wires
4. Breadboard
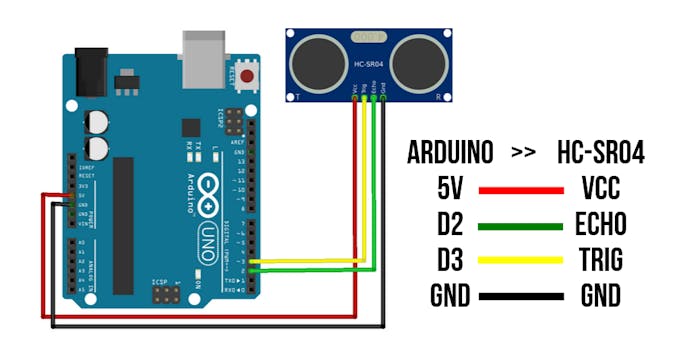
The connection of Arduino and Ultrasonic Sensor HC-SR04
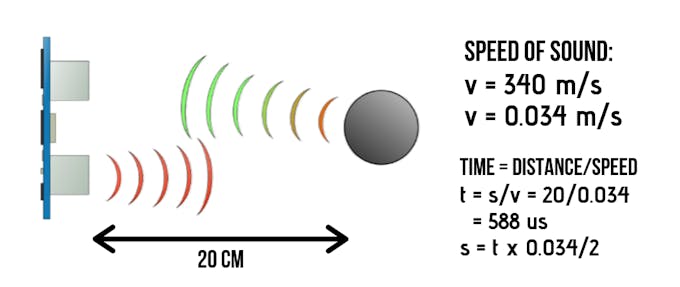
For example, if the object is 20 cm away from the sensor, and the speed of the sound is 340 m/s or 0.034 cm/µs the sound wave will need to travel about 588 microseconds. But what you will get from the Echo pin will be double that number because the sound wave needs to travel forward and bounce backward. So in order to get the distance in cm we need to multiply the received travel time value from the echo pin by 0.034 and divide it by 2.
For the programming code, first we need to define the Trigger Pin and Echo Pin that connected to Arduino board. In this project EchoPin is attached to D2 and TrigPin to D3. Then define variables for the distance (int) and duration (long).
In the loop first you have to make sure that the trigPin is clear so we have to set that pin on a LOW State for just 2 µs. Now for generating the ultrasound wave we have to set the trigPin on HIGH State for 10 µs. Using the pulseIn()function you have to read the travel time and put that value into the variable “duration”. This function has 2 parameters, the first one is the name of the echo pin and for the second one you can write either HIGH or LOW. In this case, HIGH means that the pulseIn() function will wait for the pin to go HIGH caused by the bounced sound wave and it will start timing, then it will wait for the pin to go LOW when the sound wave will end which will stop the timing. At the end the function will return the length of the pulse in microseconds. For getting the distance we will multiply the duration by 0.034 and divide it by 2 as we explained this equation previously. At the end we will print the value of the distance on the Serial Monitor.
Steps :
1. First do the wiring as shown in the picture
2. Open Arduino IDE Software and write down your code, or download the code below and open it
3. Choose your own Arduino board (in this case Arduino Uno), by selecting Tools > Board > Arduino/Geniuno Uno
4. Choose your COM Port (usually it appears only one existing port), Tools > Port > COM.. (If there are more than one ports, try it one by one)
5. Upload your code by pressing Ctrl + U or Sketch > Upload
6. To display the measurement data you can use Serial Monitor by pressing Ctrl + Shift + M (make sure that the baudrate speed is 9600)

{kind=link}
1 Comments
hi
ReplyDelete